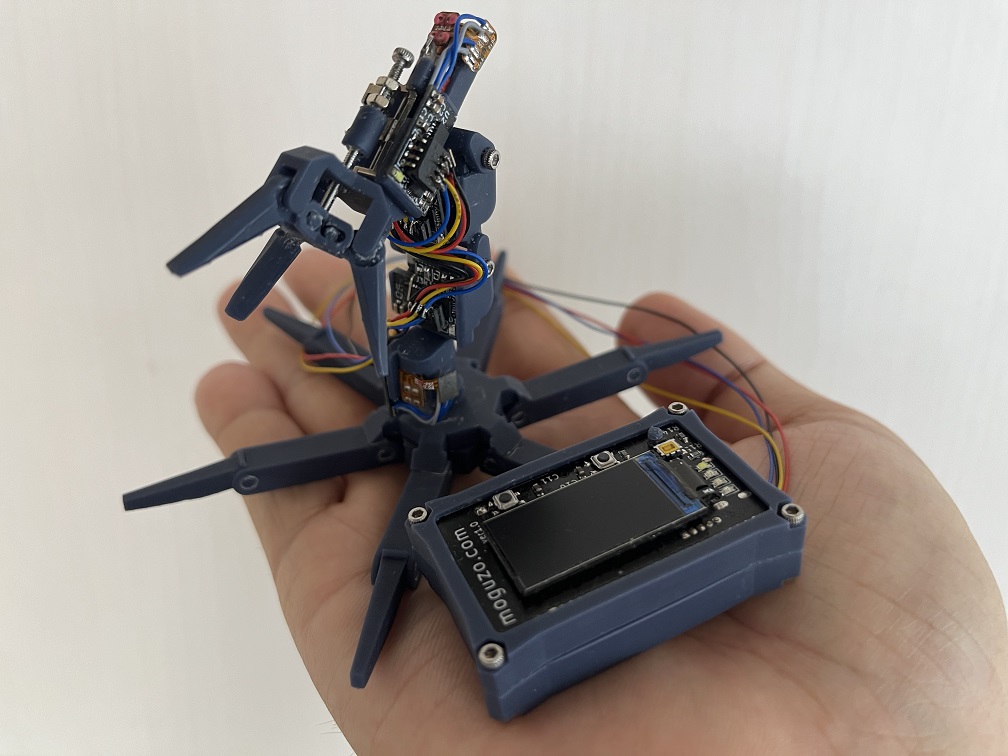
手乗りアームロボット
"できるかぎり小さく"をコンセプトにアームロボットを製作。通常のサーボモータでは
実現できなかったため、遊星ギアを装備したマイクロステッピングモータを探し出して実現。
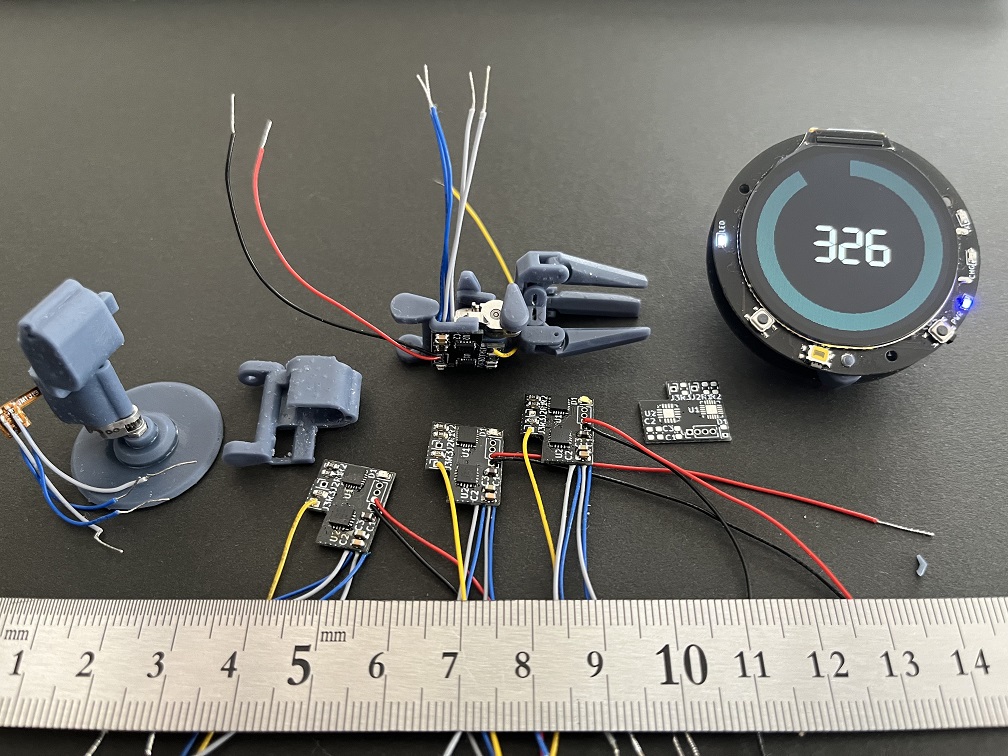
各軸にコントローラ(Attiny1616)とステッピングモータドライバーを装備し、自作の
ESP32からI2C通信で制御しています。
Kariya Micro Maker Faire 2024 @youtoyさんのポストから
https://youtube.com/shorts/taLG4PpMdhI?si=wG3CGaLB7HemztqQ
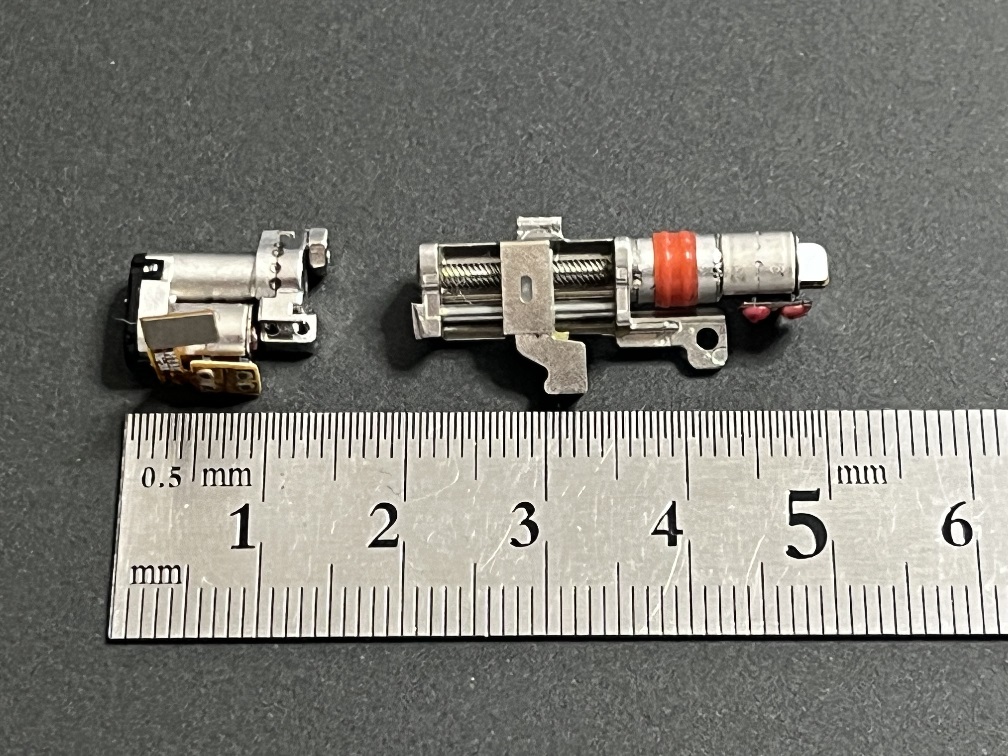 使用しているモータはこれのよう https://androidcommunity.com/asus-zenfone-6-teardown-reveals-some-unique-design-20190624/
使用しているモータはこれのよう https://androidcommunity.com/asus-zenfone-6-teardown-reveals-some-unique-design-20190624/
ESP32コアパッケージ2023
ESP32 CORE PACKAGE2023
arduinoやESP32の開発基盤はたくさんありますが、ケースを自作する必要があったり
サイズが以外と大きかったり。
また、デザインが今一つのものや小さいものはGPIOが少なかったりと「いい感じ」
のものがありませんでした。
そこで「オールインワンで拡張性があるモジュールを手軽に」を意識し自作した
ESP32モジュールです。

概要
ブレッドボードで開発もそのまま実装もできるディスプレイ・バッテリーを
ケースに収めたESP32モジュール
特徴
・デュアルコア240MHz プロセッサにWi-Fi/bluetooth 16MBフラッシュを加えた
ESP32-WROOM-32E-N16を搭載
・外部に取り出し可能な25本のピンに加え2つのSTEMMA QT/Qwiicコネクタを装備
・電源はUSB type-C または Lipolyバッテリー(200mAH)から供給
・USBシリアル接続にハード上6MBbpsまで対応可能なCH343Pを搭載
・ディスプレイは0.96インチ(160x80) TFTcolor 又は 1.28インチ(240x240) 円形
・ロータリエンコーダとプッシュスイッチによる優れた操作性
・5.2mm四方の超小型ブザー
・LEDは電源(青)充電(赤)TX(柿)GPIO13(白)
・技適対応済み
https://youtube.com/shorts/taLG4PpMdhI?si=moypV2aQbkrHtMD5